Incremental Map Modeling for Lightweight SLAM via Deep Reinforcement Learning
Abstract
Simultaneous localization and mapping (SLAM) technology which builds a map in a pose graph has high accuracy but low memory utilization and limitations in handling full memory. This paper proposes a keyframe decision-making method based on the visual SLAM framework and deep reinforcement learning. The keyframe selection instruction is given to the mapper, and the map size is controlled to achieve map modeling. Furthermore, the map increment obtained by 3D reconstruction can obtain the intersection relationship between keyframes. We use a self-defining reward function to create the network learning policy to maximize map coverage and minimize memory usage. Experiments demonstrate that our method can perform accurate map modeling without affecting the quality of the mapping, thus reducing memory requirements.
Contributions
- incremental map remodeling according to SLAM requirements to reduce SLAM memory usage based on deep reinforcement learning
- a new reward function to learn map completion and memory optimization
- effectively reducing the number of keyframes in the map
Proposed Method
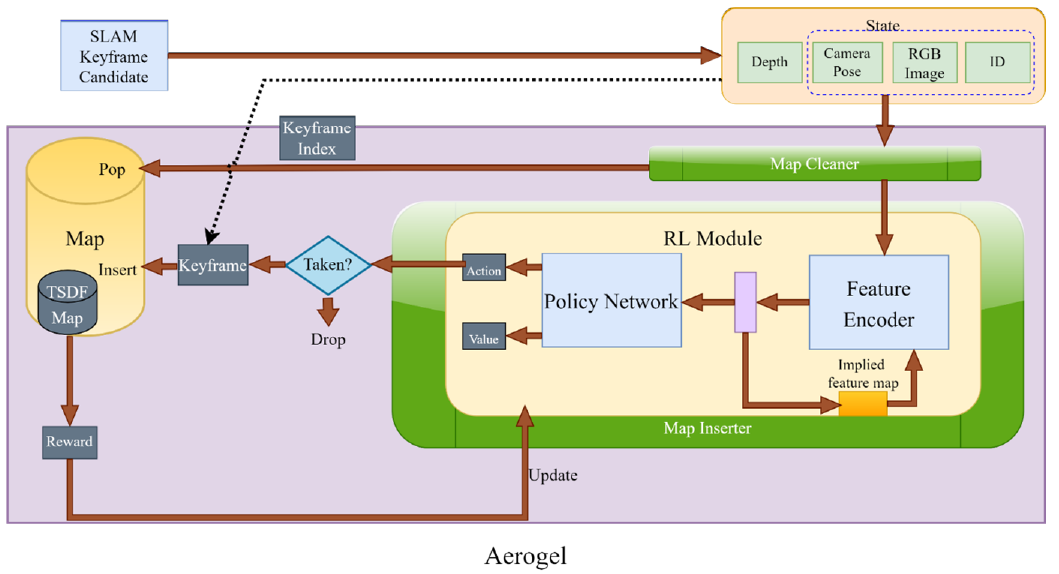
3D feature encoder extracts input images to features with spatial information according to the camera position. Policy network output keyframes decision and expected value, and suggest to map managers for map edit. TSDF calculates rewards during the training policy network by mapping map output from the map manager and the value is the expected reward of the image, which also represents the importance of this image on the map.
Experimental Results
| Methods |
| Keyframes[%] |
t_rel(m) |
r_rel(deg) |
M_comp(%) |
| Input data |
2119 |
– |
– |
– |
| ORB SLAM2[1] |
276.4[86.9] |
0.091 |
2.235 |
96.76 |
| RESLAM[2] |
406.1[80.8] |
0.216 |
6.234 |
97.3 |
| Ours+ORB SLAM2 (W/O Map cleaner) |
102.1[95.1] |
0.096 |
2.529 |
95.0 |
| Ours+ORB SLAM2 |
66.7[96.8] |
0.101 |
2.451 |
94.5 |
| Ours+RESLAM |
100.0[95.2] |
0.267 |
8.268 |
96.8 |
| Ours (W/O Map cleaner) |
147.6[93.0] |
0.120 |
2.983 |
98.0 |
| Ours |
100[95.2] |
0.124 |
2.861 |
97.0 |
The best results are depicted in red, and the row in bold indicates our results. KFs is the number of keyframes, [%] indicates the percentage of keyframes saved compared with all frames. Ours+SLAM system uses this SLAM as a candidate, pure ours uses our method to provide keyframe decision for SLAM. W/O map cleaner depicted a method for large system applications under the decision-making combination.
Reference
- Raul Mur-Artal and Juan D Tard´os. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE transactions on robotics, 33(5):1255–1262, 2017.
- Fabian Schenk and Friedrich Fraundorfer. Reslam: A real-time robust edge-based slam system. In 2019 International Conference on Robotics and Automation (ICRA), pages 154–160. IEEE, 2019.